 All subjects
All subjects
- All subjects
Physique-Chimie
Physique
MPSI/PCSI
Masse-ressort
Dans cet exercice sur les oscillateurs mécaniques, nous cherchons à déterminer l'équation du mouvement pour un système masse-ressort horizontal.
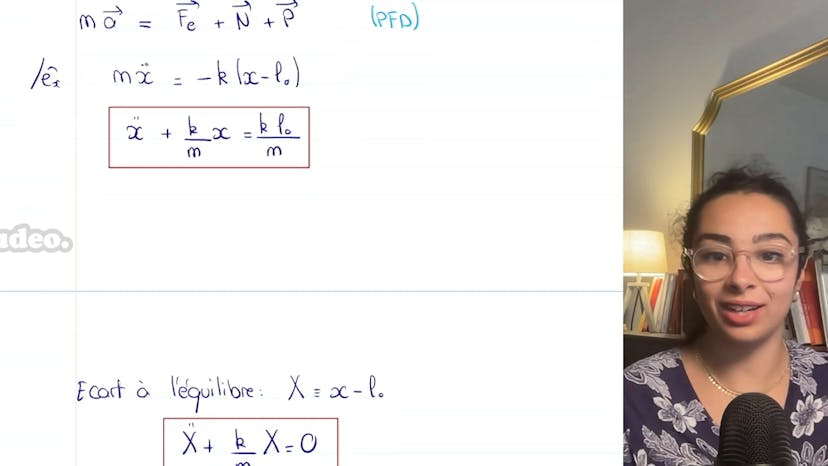
Tout d'abord, il est conseillé de représenter deux situations différentes : l'équilibre et une légère compression ou extension du ressort. En analysant les forces en présence, nous constatons le poids (P = mg), la réaction du support (N) qui compense le poids mais n'affecte pas le mouvement, et la force de rappel élastique (FE = -KX) où X représente l'extension ou la compression du ressort (dans la direction de l'étirement).
En projetant le principe fondamental de la dynamique sur l'axe de l'extension X, nous obtenons l'équation MX'' = -KX. Pour simplifier, nous posons X' = X - L0, où L0 est la position d'équilibre. Cette équation devient alors homogène : X'' + (K/M)X = 0.
En effectuant un changement de variable et en décalant le repère, nous trouvons l'équation d'oscillateur harmonique : X'' + ω0^2X = 0, avec ω0^2 = K/M. Cette équation est fondamentale en physique et apparaît fréquemment.
Physique-Chimie
Physique
MPSI/PCSI
Oscillateur harmonique
Dans cette vidéo, nous poursuivons notre série en résolvant l'équation différentielle d'un oscillateur harmonique. Nous examinons spécifiquement l'équation d'oscillateur harmonique que nous avons abordée dans la vidéo précédente pour le système de masse ressort, mais qui est également applicable à de nombreux autres types de systèmes.
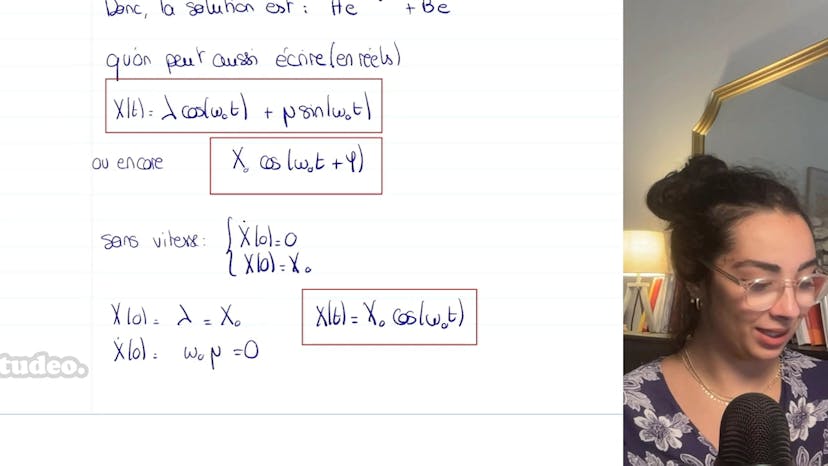
Dans cette équation, x représente l'écart par rapport à l'équilibre. Pour bien comprendre d'où cela vient, nous adoptons une approche mathématique et vous verrez ensuite qu'il existe des raccourcis en physique. L'équation caractéristique de cette équation différentielle est r² + ω0² = 0, ce qui donne les solutions r = ±iω0. En combinant les exponentielles de chacune de ces solutions, nous obtenons AEiω0t + BE-iω0t.
Cependant, en physique, nous nous intéressons uniquement aux nombres réels. Ainsi, si nous exprimons ces solutions en réel, nous obtenons une forme λcosω0t + μsinω0t. Une autre façon pratique de l'écrire est de prendre x0 au lieu de λ, ce qui nous donne une expression de la forme x0cosω0t. Vous pouvez choisir la méthode qui vous convient le mieux. Personnellement, j'aime les combinaisons linéaires de cosinus et de sinus, car je m'y suis habitué et je trouve que cela fonctionne bien. Cependant, le déphasage peut parfois être plus pratique.
Si nous n'avons pas de vitesse initiale, x.0 = 0 et x(0) = x0. Dans ce cas, la constante λ est égale à x0 et la constante μ est égale à 0. Cela nous donne donc xt = x0cosω0t. Si nous considérons exactement le même type d'expression avec φ = 0, nous pouvons utiliser la même méthode pour les conditions initiales.
Physique-Chimie
Physique
MPSI/PCSI
Pendule simple
Dans ce cours, nous examinons le pendule simple et cherchons à déterminer son équation du mouvement. Le pendule simple se compose d'un fil attaché à une masse, et nous repérons sa position par l'angle theta.
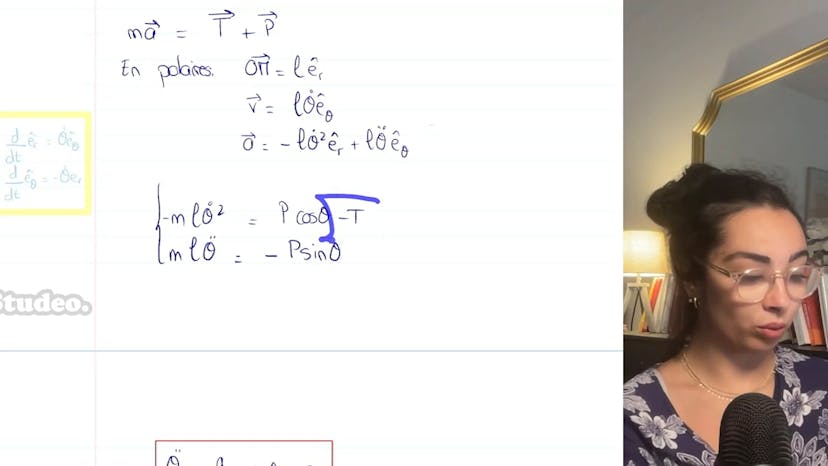
En appliquant le principe fondamental de la dynamique et en faisant un bilan des forces, nous avons le poids orienté vers le bas et la tension du fil qui maintient la bille attachée. En coordonnées polaires, nous utilisons les dérivations des vecteurs de base, ce qui simplifie les calculs.
Nous obtenons les équations suivantes : -ML*theta point carré = P*cos(theta) - T et ML*theta seconde = -P*sin(theta). L'équation qui permet de déterminer la tension du fil est T = P*cos(theta) - ML*theta point carré.
L'équation du mouvement du pendule simple est donnée par theta seconde + (G/L)*sin(theta) = 0. En utilisant l'approximation des petits angles, où sine theta est approximativement égal à theta, nous obtenons l'équation d'un oscillateur harmonique : theta seconde + (G/L)*theta = 0.
La constante propre de cet oscillateur harmonique est la racine carrée de G/L.
J'espère que cela vous a été utile et je vous retrouve bientôt pour la suite.
Physique-Chimie
Physique
MPSI/PCSI
Oscillations non-amorties
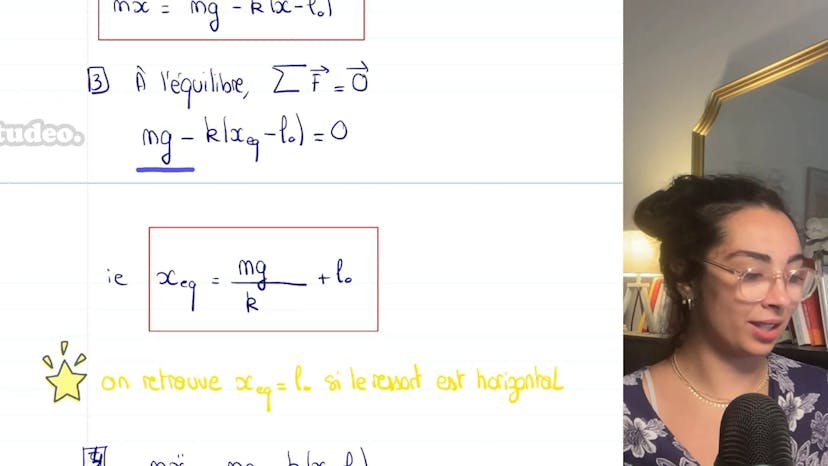
Dans cet exercice, nous étudions les oscillateurs harmoniques non amortis. Nous nous intéressons spécifiquement à un système masse-ressort vertical, en négligeant la poussée d'Archimède et les frottements. Tout d'abord, nous faisons un bilan des forces qui agissent sur la masse m. Les forces incluent le poids dirigé vers le bas (mgex) et la force de rappel du ressort (kx-l0ex). Nous vérifions que la force de rappel ramène le ressort vers sa position d'équilibre lorsqu'il est étiré. Ensuite, nous déterminons l'équation différentielle en utilisant le principe fondamental de la dynamique projetée sur ux. Nous obtenons mx² = mgex-kx-l0. Lorsqu'il atteint la position d'équilibre, les forces se compensent, ce qui donne mg-kx-l0 = 0. La position d'équilibre est ainsi donnée par xex = l0 + mg/k. Cette relation montre que plus la masse est grande, plus la position d'équilibre est basse par rapport à l0. L'équation différentielle vérifiée par x en fonction de x, xex, m et k est transformée en une forme plus simple en introduisant l'écart à la position d'équilibre (x - xex). L'équation devient x seconde + ω0²x = 0, avec ω0² = k/m. Nous pouvons alors déterminer la période du mouvement, t0 = 1/(2π√(m/k)). Enfin, nous résolvons l'équation en prenant en compte les conditions initiales où la masse est à l'équilibre (x = 0) mais possède une vitesse v0 dirigée vers le bas (x = v0). La solution générale est donnée par x(t) = v0/ω0 sin(ωt). Cette résolution inclut les étapes classiques pour ce type d'exercice, notamment l'application du principe fondamental de la dynamique, le changement de variable et la résolution de l'équation différentielle.
Physique-Chimie
Physique
MPSI/PCSI
Système à deux ressort
Dans ce cours, nous étudions un système composé de deux ressorts identiques placés côte à côte. Nous commençons par appliquer le principe fondamental de la dynamique pour trouver les forces exercées par les ressorts sur la masse. En dessinant les schémas représentant les ressorts comprimés ou étirés, nous pouvons déterminer les directions et les signes des forces. En appliquant le principe fondamental de la dynamique, nous obtenons une équation de mouvement où la masse est soumise à une force élastique de la forme KL - 2X, où K est la constante du ressort, L est la longueur du ressort à vide et X est la position de la masse par rapport à l'équilibre.
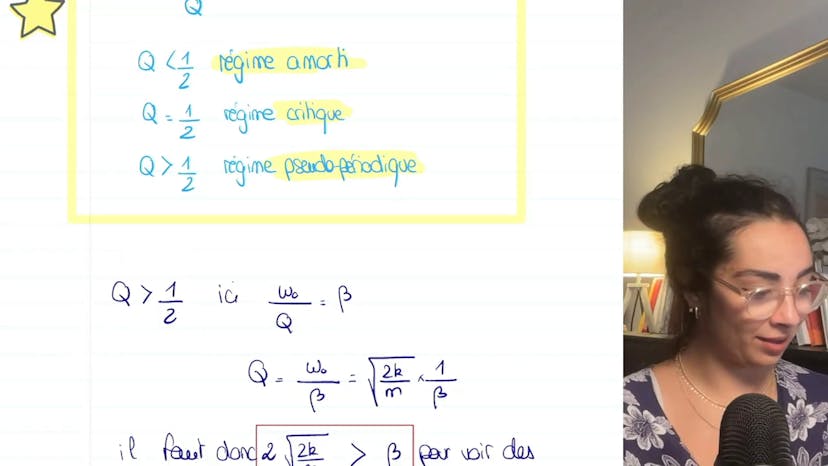
Ensuite, nous étudions le cas des oscillations amorties en ajoutant une force de frottement à l'équation de mouvement. Cette force est de la forme -βX', où β est le coefficient de frottement et X' est la vitesse de la masse. Nous obtenons ainsi une équation d'oscillateur amorti X'' + βX' + 2K/MX = 0. Nous rappelons les différentes formes de cette équation et discutons des régimes d'oscillation en fonction de la valeur de β.
Enfin, nous traitons du retour rapide à la position d'équilibre. Nous trouvons que le régime critique pour un retour rapide correspond à β = 2√(2K/M), où la masse oscille avec une décrépitude minimale. Nous calculons également la période et le temps caractéristique de retour à l'équilibre dans ce régime.
Physique-Chimie
Physique
MPSI/PCSI
Mesure du champ de pesanteur
Bonjour à tous, aujourd'hui nous allons aborder la mesure du champ de pesanteur à l'aide d'un pendule simple. Pour commencer, nous allons démontrer que la période du pendule est égale à 2 pi racine de L sur G, où L représente la longueur du pendule et G le champ de pesanteur.
Pour cela, nous partirons de l'équation du pendule simple θ seconde plus G sur L sine θ est égale à 0. Dans la limite des petits angles, nous pouvons approximer sine θ par θ. Ainsi, nous obtenons une équation d'oscillateur harmonique avec oméga 0 carré égal à G sur L. En utilisant la formule de la période T0 égale à deux pi sur oméga 0, nous arrivons à T0 égale à deux pi racine de L sur G.
Il est important de noter que la valeur de G peut varier d'un point à un autre sur Terre en raison de l'altitude et de la rotation de la Terre. Ainsi, en 1672, un astronome se rend à Cayenne avec une horloge à pendule réglée à Paris. Il constate que son horloge retarde de 2 minutes et 28 secondes par jour. Nous devons donc déterminer la valeur du champ de pesanteur à Cayenne.
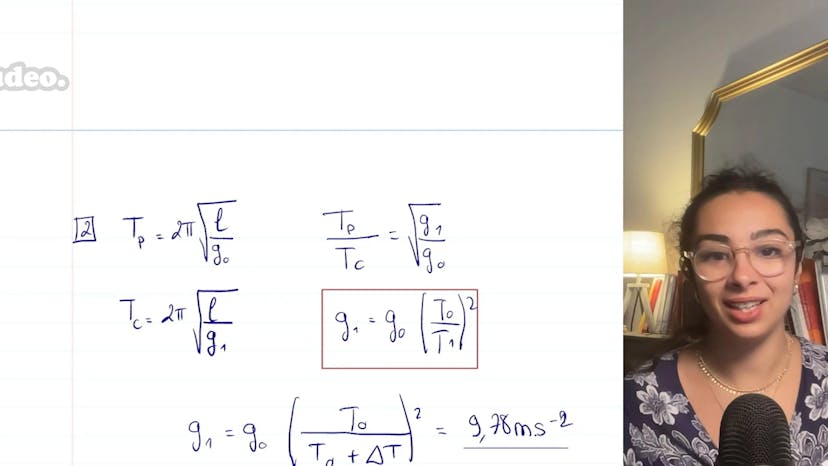
En utilisant les périodes des pendules à Paris (T0) et à Cayenne (T1), nous allons chercher à combiner ces informations pour faire apparaître un rapport intéressant. En calculant Tp sur Tc, nous obtenons racine de G1 sur G0. Donc G1 est égal à G0 fois T0 sur T1, le tout au carré.
En connaissant T1 et l'écart de temps (delta T) entre les deux pendules, nous pouvons déterminer G1. Ainsi, G1 équivaut à G0 fois T0 sur T0 plus delta T au carré, soit une valeur de 9,78 mètres par seconde au carré.
J'espère que cet exercice vous a été utile. À bientôt pour de nouveaux exercices sur la mesure du champ de pesanteur.
Physique-Chimie
Physique
MPSI/PCSI
Bille suspendue à un fil
Dans cet exercice, nous étudions un pendule simple constitué d'une bille suspendue à un fil inextensible de longueur L égale à 1 m. La bille est écartée de sa position initiale de 60° et est ensuite lâchée sans vitesse initiale. Nous devons déterminer la vitesse en fonction de θ (l'angle de déviation) et trouver l'angle pour lequel la vitesse est maximale.
Pour résoudre ce problème, nous commençons par établir un bilan des forces. Nous identifions le poids P qui est égal à mg, ainsi que la tension du fil -TER. En ce qui concerne l'aspect cinématique, nous avons l'équation OM = LER, où L est une constante. Par projection de cette équation, nous obtenons les équations MLθ.² = T + mg cosθ et MLθ² = -mg sinθ, où T est la tension du fil.
Afin d'éliminer le temps et obtenir une équation reliant la vitesse et θ, nous multiplions la deuxième équation par θ point (la dérivée de θ par rapport au temps). En intégrant cette équation par rapport à dθ entre les instants initial et T, nous obtenons L/2θ point²(T) = g cosθ - g cosθ0. Après avoir traduit cette équation en fonction de θ, nous obtenons l'expression de la vitesse en fonction de θ : v = racine de 2g cosθ - cosθ0. La vitesse est maximale lorsque cosθ = 1, ce qui correspond à θ = 0.
En ce qui concerne l'accélération radiale, nous utilisons l'équation Lθ point² - v²/L. En utilisant l'expression précédente pour la vitesse, nous trouvons que l'accélération radiale est égale à -2g cosθ + 2g cosθ0.
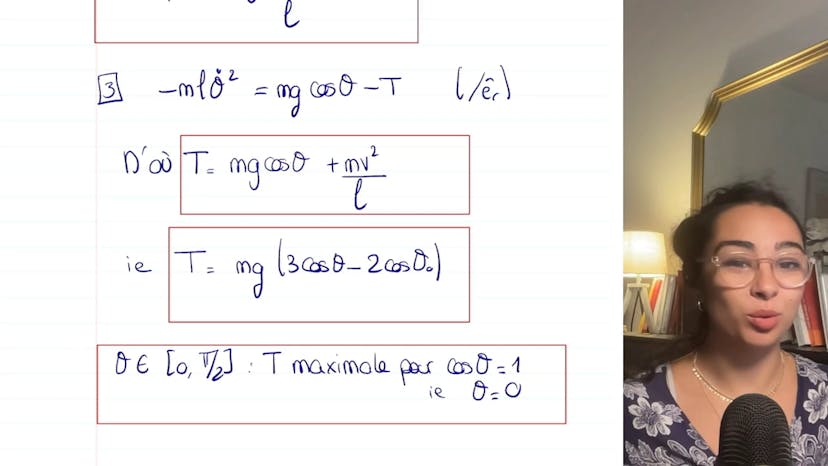
Pour l'expression de la tension du fil, nous utilisons l'équation MLθ.² = mg cosθ - T. En utilisant l'expression de la vitesse que nous avons obtenu précédemment, nous trouvons que la tension du fil est T = mg(3 cosθ - 2 cosθ0). Nous remarquons également que la tension est maximale lorsque cosθ = 1, donc lorsque θ = 0.
En conclusion, cet exercice sur le pendule simple nous permet de comprendre comment une bille suspendue à un fil inextensible se comporte en termes de vitesse, accélération et tension du fil en fonction de l'angle de déviation θ. Ces concepts peuvent également être appliqués à d'autres types de problèmes, tels que les problèmes de décollement.
Physique-Chimie
Physique
MPSI/PCSI
Mouvement circulaire et ressort
Dans ce cours, nous abordons le mouvement circulaire avec un ressort. Une masse (m) est placée sur un plan horizontal et reliée à un point fixe (o) par un ressort de constante de raideur (k) et de longueur initiale (l0). Au départ, la masse est lancée avec une vitesse initiale (v0).
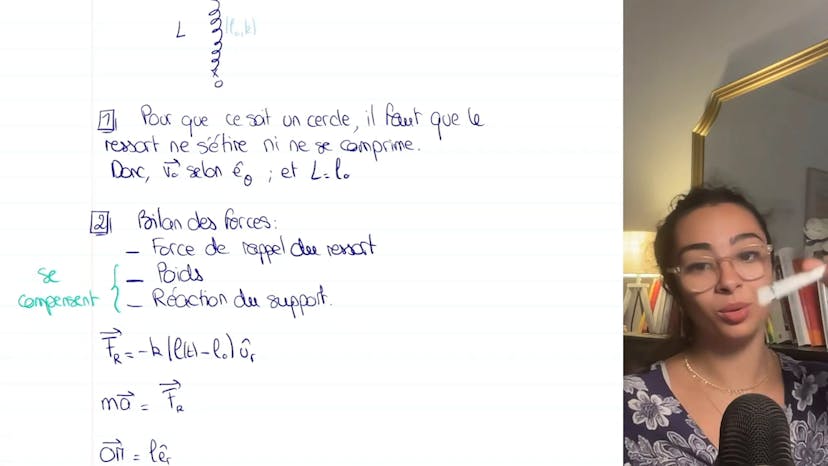
Pour déterminer le rayon du cercle et la direction de v0, nous devons tenir compte du fait que le ressort ne doit ni être étiré ni comprimé. Donc, le rayon du cercle est égal à la longueur initiale du ressort (L0).
Quant à la direction de v0, elle doit être tangente au cercle, c'est-à-dire selon la direction Eθ.
Ensuite, nous montrons que si le mouvement est circulaire, alors il est également uniforme. En effectuant un bilan des forces, nous trouvons la force de rappel du ressort, le poids et la réaction du support. En utilisant les équations de la cinématique, nous trouvons l'expression de l'accélération.
Nous pouvons réarranger cette expression pour obtenir une forme pratique : DV/DT Eθ - V^2/LER. Cette forme nous permet de voir que si le mouvement est uniforme, alors DV/DT est nul. Si nous projetons la force sur ER, nous obtenons une équation établissant que la vitesse est constante.
Finalement, nous donnons une condition sur L pour que le mouvement soit circulaire. Nous constatons que cette condition est cohérente avec notre constatation précédente sur le mouvement uniforme. La vitesse initiale (v0) peut être calculée en utilisant l'expression v0 = K(L-L0)L/M.
Ce cours combine les concepts des oscillateurs et des forces centrales, car il s'agit d'un oscillateur harmonique en rotation. Il n'y a pas de difficultés majeures, mais il est recommandé de retenir la forme pratique de l'expression lorsque nous traitons des forces centrales.


